免职声明:本网站为公益性网站,部分信息来自网络,如果涉及贵网站的知识产权,请及时反馈,我们承诺第一时间删除!
This website is a public welfare website, part of the information from the Internet, if it involves the intellectual property rights of your website, please timely feedback, we promise to delete the first time.
电话Tel: 19550540085: QQ号: 929496072 or 邮箱Email: Lng@vip.qq.com
摘要: 从大的方面讲,计算机工业控制自动化系统的体系结构主要分为四大类:集中式控制系统DDC体系结构;分布式控制系统DCS体系结构;监督控制和数据采集SCADA系统体系结构;基于B/S结构的综合监控系统体系结构。 这四种体系结构有其各自不同的发展背景和特点,自然也有着..
|
从大的方面讲,计算机工业控制自动化系统的体系结构主要分为四大类:集中式控制系统DDC体系结构;分布式控制系统DCS体系结构;监督控制和数据采集SCADA系统体系结构;基于B/S结构的综合监控系统体系结构。 这四种体系结构有其各自不同的发展背景和特点,自然也有着不同的适用范围。
1 集中式控制系统DDC体系结构
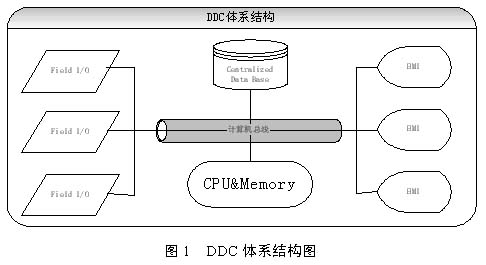
DDC是Direct Digital Control,即直接数字控制的缩写,它是计算机进入控制和自动化领域以来最早应用的体系结构。DDC完全以单个的计算机为核心,利用计算机的硬件和软件平台构筑控制系统。DDC系统利用计算机的输入输出通道和过程I/O设备将计算机和现场连接起来,将被控过程的数据送入计算机;利用计算机的处理和存储空间建立集中的实时数据库;利用计算机的计算和处理能力进行控制计算和各种处理,如人机界面显示、报警、统计、报表等。在DDC 系统中,所有的部分,从计算机的CPU到存储器、外部设备、过程I/O等都是通过计算机总线实现连接的,因此系统的规模受到了很大的限制,而且对外的通信功能也很弱,目前只有在规模比较小且对外通信联系比较少的应用中使用DDC体系结构。典型的DDC体系结构如图1所示。
DDC系统的软件是比较复杂的,因为所有的功能都集中在一台计算机中完成,因此需要一个相当庞大复杂的软件系统,这个系统要实现各种功能,而且要很好地协调各个功能之间的关系,包括对计算机资源(CPU时间、计算机总线时间、内存和外存空间等)的使用和运行中的相互影响等,其实现难度是相当高的。因此目前DDC体系结构只用在规模较小、功能比较单一的控制场合,特别是一些嵌入式控制领域。一般来说,嵌入式控制的现场I/O数量很少,相应的功能也比较单一,因此不需要庞大而复杂的数据库,特别是人机界面HMI非常简单甚至没有。在这种应用场合,正好发挥了DDC构造简单,成本低廉的优势。
2 分布式控制系统DCS体系结构
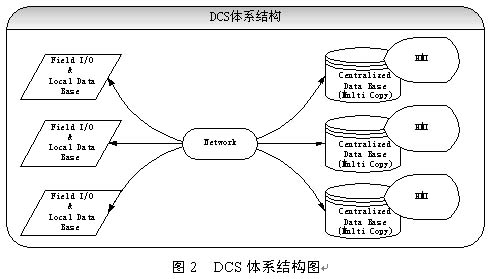
DCS的目标,是对生产设备或装置的运行状态进行直接的自动控制,以优化这些设备或装置的生产效率,达到保证生产设备或装置运行的安全以及人身安全、增加产量、提高质量、降低能源消耗、减少环境污染的目的。由于是计算机直接对生产过程进行控制,因此要针对被控过程建立数学模型,以便计算机根据模型进行计算并实施控制。DCS体系结构是由直接数字控制(即DDC)系统发展而来的,其主要特点是面向现场的自动控制,减少人工干预,如闭环控制(CloseLoop Control)系统。在这类系统中,人机界面只是一种辅助性的功能,系统对人的输出只是为了操作人员监视系统的运行是否正常,是否需要对某些异常情况进行处理;而人对系统的输入是为了改变一些控制参数或在手动与自动之间进行切换,一般情况下并不直接向现场发出控制命令。典型的DCS体系结构示意图如图2所示:
在这里,我们可以看到它的几个重要特点: (1) 直接数字控制系统由现场I/O、现场控制、人机界面等三个主要部分组成。DCS将DDC中由单一计算机实现的现场I/O、现场控制、人机界面等功能分别由两类不同的计算机完成。其中的一类完成现场I/O和现场控制功能,一般称之为现场控制站(FCS)或分散过程处理单元(DPU);另一类计算机完成系统的人机界面功能,一般称之为操作员工作站(OPS)或直接称为HMI。另外,为了应用工程的二次开发(即系统组态)和系统运行期间对系统本身运行状态的监视,系统还设有工程师工作站。 (2) 在一个具体的应用系统中,一般会设置多台FCS,HMI也会设置多台。FCS之间是分担处理量的关系,即一个系统的众多I/O点和控制回路要分给几台、十几台甚至几十台FCS去完成,主要的目的是提高处理能力和分散FCS出现故障时的危险性;而HMI之间则是冗余的关系,系统中每台HMI的配置和功能都是相同的,因此每台HMI上都有全系统的实时数据库,每台HMI都可独立完成数据的查询、显示等功能,这样可以在任何一台HMI出现故障时不影响系统的正常运行。
(3) 由于FCS要对现场进行直接的控制,因此在FCS中要执行各种控制算法,这就必须将现场I/O所得到的“生数据”,即在A/D变换后还未经过工程量转换的二进制格式数据转换成“熟数据”,即计算机能够识别并能够进行计算或处理的定点数、浮点数、布尔量等,同时在FCS中还建立了当地数据库,用于存储与控制回路和控制执行器有关的数据,以在FCS中实现与控制有关的数学模型计算和控制操作。 (4) DCS要求FCS具有极高的自律性,即一旦系统投入正常运行后,每个FCS都应该能够独立运行,不受外界的干扰。在网络不通或HMI失效等情况下仍能够正常执行控制功能,这是对DCS的最基本要求。因此,在一个具体的DCS应用中,只要保证了FCS的高度自律性,这个控制系统就有了最基本的可靠性保证。 (5) 由于HMI需要了解掌握全系统的情况,因此在HMI中需要建立中央数据库,它被设计成多拷贝的方式,即每台HMI上都有一份自己的中央数据库拷贝,这一方面是为了快速、方便、可靠,另一方面也是由于DCS的人机界面对于系统完成最主要控制功能并不起决定性作用,而且处于一种数据接受者的地位,因此其数据的更新可由FCS通过网络对HMI进行广播或群发来完成。 (6) DCS的网络连接各个FCS和HMI,从逻辑关系上看,FCS和HMI分属两个不同的层次,但在物理上,系统中所有的节点,不论是FCS还是HMI,其地位都是对等的,互相之间均可实现信息的发送和接收。 (7) DCS一般用于设备级或装置级的控制,因此对系统的要求是自动化程度高,控制响应速度快和可靠性高。对其规模却不要求很大,一般在3 000个I/O点以内,个别规模特别大的DCS可达到5 000个I/O点左右。 (8) 在使用DCS对生产设备或装置进行控制时,操作人员一般不会去直接控制执行器(实际上人的控制也不可能达到那样高的速度),人工干预只是调整回路控制的参数或改变生产工况。在某些情况下,操作员为了特殊的需要才会将自动控制切换成手动控制,由人工进行直接的操作和控制。
3 监督控制系统SCADA体系结构
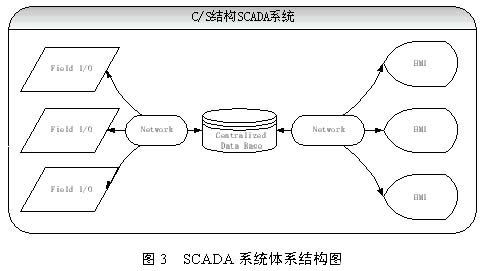
与DCS不同,SCADA系统以对生产过程现场的监视为主,是向操作控制人员提供现场信息并由操作控制人员决定要实施的控制,最后由人发出指令对现场的执行器进行操作的系统。在SCADA系统中,操作控制人员是对现场实施控制的主体,而计算机系统则处于从属和辅助的地位,这种由人控制而非系统直接控制的方式被称为监督控制。监督控制的对象一般是比较大范围的、由多台生产设备或装置组成的系统,其目标首先是保证生产过程的安全,而对生产过程的优化,则是一种更大范围的、更高层次的优化。一般这种控制是找不出合适的数学模型的,只能依靠人的判断和决策。在SCADA系统中,人机界面是最重要的功能,因为操作控制人员要完全依靠人机界面来了解现场的情况,并通过人机界面发布指令以实现对现场的控制。因此现场数据的准确性、完整性、一致性、实时性和人机界面的表现能力、使操作人员迅速准确全面理解现场状态的能力、操作方便性、防止人为错误的能力等特性都是至关重要的。典型的SCADA系统体系结构如图3所示,可以看出,这是一个Client/Server体系结构。
SCADA系统的主要特点有: (1) SCADA系统由现场I/O站、主服务器和人机界面等三个主要部分组成。现场I/O站一般称之为RTU,即远程终端单元;主服务器上建有全局数据库,系统中所有的实时数据均集中到主服务器中;HMI则主要完成人机界面功能。与DCS一样,在SCADA系统中也设有工程师工作站。 (2) 在一个具体的应用系统中,一般会设置多台RTU,HMI也会设置多台。由于SCADA系统是面向大范围的数据采集和监视,因此系统在地理位置上是分布较广的,多台RTU基本上按照测量点的地理分布而设置。多台HMI之间是冗余的关系,系统中每台HMI的配置和功能都是相同的,都可独立完成数据的查询、显示等功能,这样可以在任何一台HMI出现故障时不影响系统的正常运行。各HMI可根据操作者的权限或功能进行在线的设定,使其完成不同的工作。 (3) 与DCS不同的是,由于SCADA系统所采集的数据量一般都非常大,从几千个I/O点直到几万个I/O点,有些特大型系统甚至达到几十万个I/O点。除了数据量大的特点外,SCADA系统还要对数据进行大量的处理和计算,例如统计、分析、排序、筛选等,这些都需要巨大的存储容量和强大的处理能力。显然在一个系统中配置多台能够满足这种要求的HMI是不经济的,因此在每台HMI上建立全系统的实时数据库,即DCS所采用的多拷贝实时数据库方式是不现实的。更重要的是,随着数据量的增加,作为数据源的RTU如何保证每个实时数据库的拷贝都能够得到及时的、不产生偶尔遗漏的数据更新是相当困难的,其通信的开销也大得惊人。因为在这种情况下,不允许采用广播方式,虽然广播方式的通信开销很小,但这种方式所带来的某个接收节点偶尔遗漏数据更新是经常发生的,而这种遗漏的后果将是灾难性的,它不仅使各个实时数据库的拷贝之间产生实时数据的不一致,还使得以实时数据为基础的计算和处理结果产生不一致,进而会给各个操作人员输出不同的结果,使他们对现场的情况做出不一致的判断,这在实际运行中是不允许的。另外,由于SCADA系统对现场的控制都是通过操作人员在HMI工作站上发布操作命令实现的,因此,由操作命令引起的数据库改变相当频繁,而每次改变都要使所有的数据库拷贝同步改变,显然这是很困难而且很难保证正确的一项工作。可以看出,在DCS中行之有效的多拷贝方式的实时数据库形式,在SCADA系统中将产生相当大的负面影响。因此SCADA系统中均采用了Client/Server的体系结构,系统中设服务器以管理集中的、单一拷贝的实时数据库,并完成数据的处理和计算。而HMI则作为客户端使用数据。集中的数据库将保证多客户端在同时进行操作等数据库更改时保持严格的互斥,以避免数据库产生混乱。 (4) 由于没有对现场进行直接闭环控制的要求,因此RTU的功能比较简单,其最主要的功能,就是将现场测量所得到的数据按照实时性的要求送入集中的实时数据库。这里,测量数据可以是其原始格式,即所谓的“生数据”。当然为了扩充现场端的就地处理功能,现在很多新型RTU具备了从“生数据”到“熟数据”的转换功能,同时还具备了计算、控制、显示等就地处理功能。但带来的问题是通信量的增加和通信规约的复杂化。 (5) 在DCS中特别强调的现场控制站FCS的自律性,在SCADA系统中并没有太大的意义,这是由于在SCADA系统中RTU不能够脱离主系统而独立工作,因此一旦RTU和主系统之间的通信中断,就只有等待通信的恢复。但在SCADA系统中,RTU的可靠性要求是相当高的,这是因为这类设备往往是随生产设备安装在现场的,一般没有单独为RTU设置的电子设备间。系统对RTU的要求是抗恶劣环境、工作可靠、免维护。因此RTU的设计是在满足基本功能需求的前提下尽量简化,以最简洁的设计,最少的元器件,实现最需要的功能,以最大限度地满足可靠性的要求。 (6) SCADA系统的网络分为两个层次,底层是现场I/O网络,其主要的作用是将各个RTU与服务器连接在一起,实现现场I/O与实时数据库之间的数据通信。在传统的SCADA系统中,底层网络通常采用点对点的串行口加MODEM的通信方式,用音频话路作为传输介质,因此服务器必须具有多串口通信的能力,或利用通信前置机来完成多串口通信的功能。近年来已有越来越多的SCADA系统采用了局域网和广域网作为其底层的通信介质。SCADA的上层网络是HMI网络,其主要作用是将服务器和各个HMI连接在一起,实现HMI与实时数据库之间的数据通信。
4 综合监控系统体系结构
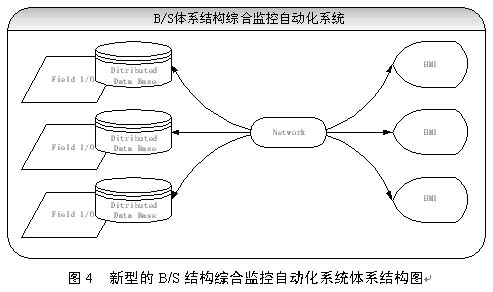
随着信息技术的不断发展和计算机自动控制系统、监督控制系统应用的不断深入,传统上以功能或形态划分的多种计算机系统,其分界线现在已越来越模糊了。如过去单纯为实现闭环自动控制的DCS和以监督控制及数据采集为主要功能的SCADA系统之间,就已经出现了融合的趋势,产生了综合监控自动化系统。这种系统在底层设置现场控制站以实现闭环控制,同时在上层采集全系统的数据,并进行监督控制。对于这类系统,如何结合DCS和SCADA的设计特点并将其有机结合,成为新一代的全数字化系统,是在体系结构设计中需要慎重考虑的问题。随着开放式网络结构的不断成熟和IP技术的高速发展,B/S结构已逐步成为计算机系统,特别是大型计算机系统的标准体系结构。这些技术的发展自然会有力地影响着工业控制和自动化系统,于是出现了基于Browser/Server结构的综合监控自动化系统体系结构。图4所示为一种新型的B/S结构综合监控自动化系统体系结构:B/S结构的综合监控自动化系统的主要特点有:
(1) 综合监控自动化系统由现场测控子系统和人机界面子系统这两个主要部分组成。现场测控子系统兼有RTU的数据采集功能和DCS的闭环控制功能;而人机界面子系统则主要完成人机界面,即HMI功能。与DCS和SCADA系统一样,在综合监控自动化系统中也设有工程师工作站。 (2) 在一个具体的应用系统中,一般会设置多个现场测控子系统,HMI也会设置多台。多个现场测控子系统基本上是按照测量控制点的地理分布而设置的。而HMI之间则是冗余的关系,系统中每台HMI的配置和功能都是相同的,每台HMI都可独立完成数据的查询、显示等功能,这样可以在任何一台HMI出现故障时不影响系统的正常运行。 (3) 由于现场测控子系统要对现场进行直接的控制,因此就地的工程单位数据库是必须的。这就要将现场I/O所得到的“生数据”转换成“熟数据”。即计算机能够识别并能够进行计算或处理的定点数、浮点数、布尔量等,同时在现场测控子系统中还建立了当地数据库,用于存储与控制回路和控制执行器有关的数据,以在现场实现与控制有关的处理与计算。 (4) 综合监控自动化系统同样要求现场测控子系统具有极高的自律性,即一旦系统投入正常运行后,每个现场测控子系统都应该能够独立运行,不受外界的干扰,在网络不通或HMI失效等情况下仍能够正常执行控制功能。 (5) 综合监控自动化系统充分利用了局域网或广域网的成熟技术在现场测控子系统和HMI之间建立网络连接,在软件技术上采用面向对象的编程方法,因此在网络通信中采用了对象代理机制。这一系列新技术的采用使得原来必须在集中的服务器上完成的数据处理和计算功能可以在分布数据库的基础上完成,而不再需要集中的数据库系统。在HMI端,当需要了解现场的全面情况时,可通过网络将所需的各种数据集中在一起并计算出结果,这样系统的核心就从服务器变成了网络系统。如果说,传统的SCADA系统在规模上受到了服务器容量和处理能力的限制,则综合监控自动化系统的限制只在网络的带宽上,因此,整个系统的规模和处理能力实际上可以认为是无限的。
5 结语
将以上所述四种体系结构归纳起来,可以总结出它们之间的主要异同和发展趋势: (1) 四种体系结构最主要的区别在于其实时数据库的形态不同,DCS采用了多拷贝的实时数据库,DDC和SCADA系统采用了集中式的实时数据库,综合监控自动化系统则采用了分布式的实时数据库,而分布式实时数据库目前已显示出了强大的生命力。 (2) 系统的功能正在逐步从单一向综合的方向发展,许多过去要几个不同系统才能够实现的控制和自动化功能,现在只需要一个系统即可完成。随着系统向着高层次、大范围、全功能的方向发展,计算机网络的重要性在系统中将越来越明显。 (3) 数字技术和IT业的成熟标准已越来越多地被控制系统所采用,如面向对象的编程方法和对象代理机制等。底层数字化的全面实现和开放互连标准的广泛使用将使长期以来存在的“信息孤岛”和“分岛控制”等局面得到根本性的改观,一体化的控制、管理、信息系统将得以实现。 |