|
摘要:介绍了一种小型无人直升机的自主控制系统,该系统可以实现小型无人直升机的自主姿态控制、任务规划、视频图像处理等功能,具有模块化程度高、成本低等优点。系统分为机载部分和地面站部分,机载部分负责飞机姿态控制,地面站部分负责任务规划及图像处理。机载部分各模块之间采用双余度总线通讯,可有效提高通讯可靠性。
关键词:无人直升机;控制;系统结构 Abstract: This paper gives an introduction to the flight control system of a small unmanned helicopter. The system is able to achieve automatic control of attitude, mission planning and video processing, and has the feature of high modularization and low cost. This system could be separated to on-board system and ground station, on-board system is in charge of helicopter attitude control, ground station is in charge of mission planning and video processing. Different modules of on-board system communicate through dual-redundancy buses, which could increase communication reliability effectively.
Key words: Unmanned helicopter; Control; System structure 近年来国际上各种无人机技术突飞猛进,国外许多型号的无人机已经可以参与实战,比如美国的全球鹰、捕食者等。相比较而言,我国在无人机技术上仍有很大差距。作为国际无人机技术的一个缩影,国际空中机器人比赛的经过十几年的发展到今天,比赛水平已经有了相当大的提高。参赛队围绕不断提高的比赛目标要求,从系统架构到底层实现以及控制算法都做出了许多创新性的工作,有许多相关论文发表在IEEE的期刊上。
为了促进国内对无人机技术的研究,提供一个相互竞争和学习交流的机会,培养高素质的航空航天人才,中国自动化学会机器人竞赛工作委员会和科技部高技术研究发展中心举办的中国空中机器人大赛将每年举办一届。中国空中机器人大赛的口号是“自主翱翔,放飞理想”,比赛按旋翼、固定翼两类飞行器分组进行。本文对清华大学“清扬队”参加首届大赛的无人直升机作一介绍。
1 整体系统结构
整个系统可以分为机载部分和地面部分,机载部分负责维持飞机的稳定飞行并提供图像信息给地面部分,地面部分根据飞机的状态以及得到的图像信息作出下一步飞行的目标规划并发送给机载部分,同时为了确保安全,防止自主飞行机构失控,添加可由操作手控制的控制器,在紧急情况下切换到操作手遥控方式。地面部分与机载部分之间有两条数据链路―一条负责传送图像;一条负责传送飞行状态和指令。地面部分可以分为地面站和图像处理平台,前者与机载飞行控制器通讯以发送控制命令并获得飞机状态信息,后者获取机载摄像头的图像并做处理以搜寻比赛目标。具体将在后面两部分详述。 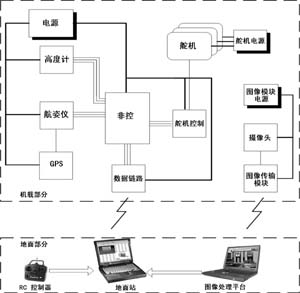
图1 整体系统结构图
2 机载控制系统
为了完成自主飞行任务,飞机需要相关功能部件完成对飞机状态信息的采集、对执行部分的控制以及对地面站命令的响应等功能。在无人机上,替代飞行员或操作手完成飞行任务的自主机构包括图像设备、飞控模块、高度测量、舵机控制、数据链路以及航姿仪等,如图2所示。 
图2 控制系统模块构成
各个模块之间相对独立,均可单独完成一定的功能,模块之间的相互连接采用总线实现,便于安装和系统集成。虽然采用的总线是较可靠的通讯标准,但是在直升机实际飞行的环境中存在震动、电磁等干扰因素,可能影响到数据传输的可靠性,为了保证正确的数据传输,采用了两套互为备份的总线系统―422总线和CAN总线。CAN总线对于数据包的传送更为方便,克服了422总线只能采用主从模式以及工作在轮询模式的缺点,并且具有更高的数据传输速度。
2.1 飞行控制计算机
飞行控制计算机是直升机的中央控制单元,负责飞机上各个单元的协调工作,并与地面站之间进行数据传输。同时根据控制算法和地面站的命令,保持飞机以一定的姿态飞行。飞控计算机处理器采用德州仪器(Texas Instruments,TI)公司适用于控制的TMS320F2812 DSP,具有多路数字总线和模拟采样通道,功耗低,运算速度足以满足实时控制的需要。
直升机模型较为复杂,而且通道之间存在耦合,如果考虑复杂情况则控制率较难实现,所以采用简单的PID控制器分通道进行控制,为了解决非线性问题,采取不同状态下采用不同参数的控制方法。具体将飞机飞行状态划分为起飞、降落、悬停、向左、向右等状态,在不同状态下设定不同的控制目标值。例如,悬停状态高度设定为固定值,俯仰、滚转以及偏航的角度都设置为零,利用四个不同的控制器分通道控制,使得飞机姿态达到设定值。以偏航方向的控制为例,如图3所示。 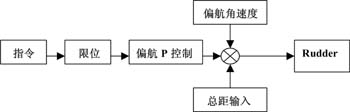
图3 偏航方向控制示意图
2.2 导航系统
为了实现对直升机姿态的控制,需要有飞机各个方向的速度位置姿态信息等,惯性导航系统的算法通过对惯性测量单元(IMU)提供的加速度和角速度的积分,得到机体的位置、速度和姿态信息(PVA)。从硬件上来说,该模块是实现了对各个加速度和角速度传感器的信息采集,但是仅仅通过以上简单的惯导算法本身很难得到有用的信息,惯性传感器的漂移和定步长积分的累计误差会使计算结果很快偏离实际值。导航系统必须考虑这些误差因素并对得到的PVA结果作出修正。 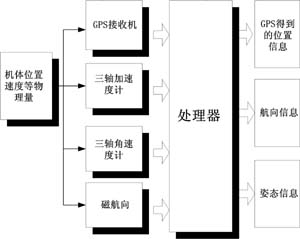
图4 导航系统模块
惯性导航模块的设计目标是实现一个独立的数字捷联惯导系统:采集惯性敏感元件的输出信号并进行解算,给出飞行器相对与给定坐标系的运动信息,通过总线实时地发送给飞行控制计算机。采集的传感器信号包括三轴的加速度、角速度、地磁在三轴的分量以及GPS(全球定位系统)信号。通过各种传感器信号的信息融合,可以有效提高导航系统的可靠性和精度。
2.3 超声波测高模块
虽然GPS系统或者惯导系统都可以提供高度信息,但是对于实现直升机起飞降落这样的任务来说,这些高度信息的精度是无法满足要求的,需要有超声测距、红外测距或者激光测距等高精度的距离测量方法。激光测距的精度较高,但是购买的成本较高,自主开发的难度也更大;红外测距的作用距离有限,同样存在着开发难度较大的问题;超声测距结合了测量距离较远(可测10m)以及开发难度低的优点,因此选择超声高度测量方案。另外超声波具有指向性强,能量消耗缓慢,在介质中传播的距离较远等优点,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求,因此在移动机器人的研制上也得到了广泛的应用。
高度测量模块的主要工作过程如下:超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物反射回来,超声波接收器收到反射波即停止计时。超声波在空气中的传播速度为340m/s,根据计时器记录的时间,就可以计算出发射点距障碍物的距离。
2.4 舵机驱动模块
舵机是无人直升机上的执行机构,通过操纵舵机来改变主旋翼的桨叶角度和桨盘角度以及尾桨的桨叶角度,就可以控制作用于飞机上的力和力矩,从而改变机体飞行状态。比赛用直升机仍然采用航模直升机的舵机,该舵机输入为PWM(脉宽调制)信号,脉冲宽度对应于舵机的位置。
为了实现可靠的控制,防止在一定条件下飞机失控,在舵机模块增加控制切换功能,即可以通过飞控计算机控制或者通过遥控手直接遥控。 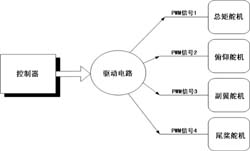
图5 陀机驱动模块
3 地面系统
地面系统负责与机载部分通讯,发送控制指令,接收飞机状态信息并处理飞机发回的图像信息。具体分为视觉处理部分以及地面站部分。
3.1 视觉处理
视觉是无人机的一个重要部分,无人机的一个重要应用―无人侦察,就是以计算机视觉为基础。视觉程序的目的是:从直升机上面的摄像头拍到的图片中检测出固定的几类图标的位置。整个检测过程分为两个阶段,第一个阶段从图片中检测出图标所在矩形的位置,并放缩为32*32大小的标准矩形;第二个阶段对这个标准矩形进行判断,决定它是哪类图标。
三个标准图标如图6所示。 
图6 三个标准图标
第一阶段获取矩形位置的流程是如下。图7为摄像头传回的一帧图片。 
图7 摄像头传回的一帧图片
首先从摄像头传回的视频中得到一帧图片,将其转换为灰度图;然后对其进行均值滤波平滑处理,消除掉图片上的一些杂质;接下来进行sobel边缘检测,将矩形从图像中分离出来,在边缘检测的同时也进行了阈值化的过程。得到区域边缘后还需要判断是不是矩形或者平行四边形,只有矩形或者平行四边形的区域可能是目标区。
第二阶段需要判断32*32大小的区域是哪一个图标。方法是:把32*32大小的区域认为是1024的一个向量空间,事先准备好3幅标准图标,每幅图标有4个方向,所以一共是12类图标,根据转换矩阵计算每类图标在向量空间中的位置;然后把第一阶段得到的区域乘以转换矩阵,得到它在向量空间中的位置,判断它和那一类图标最接近,就属于哪一类,并计算出匹配度,匹配度低于某个值则认为是干扰目标。图8为识别出的图标,m1、m2、m3分别指出图标属于哪一类,59、66、77是该区域对于那一类图标的匹配度。 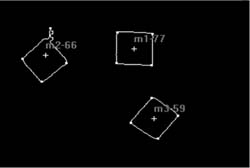
图8 识别出的图标
3.2 地面站
地面控制站程序的作用是观察飞机的各项飞行信息,包括GPS信息、飞机状态信息、飞行航迹信息等,并可以发送命令对其进行控制。地面站和飞机之间的通讯遵循设定好的测控协议。地面站界面如图9所示。 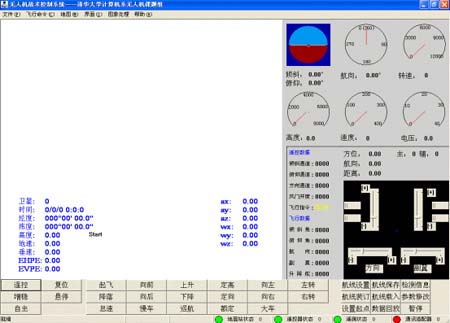
图9 地面站界面
左边空白处的文字是显示飞机发送回来的GPS信息和三轴线加速度、角速度信息。
界面右边的各项文字、仪表显示了飞机的各种状态信息,可以用于分析飞机的运行情况,其中右中的4个操纵杆可以给飞机设定升降舵、方向、风门、副翼四个参量。界面下方的按钮群是主要的操作部分,可以通过点击相应按钮进行各种操作。界面最底下的一栏是状态栏,显示了一些程序运行的信息。
地面站和视觉程序结合起来,利用飞机当前的高度、航向以及飞机所处的位置,可以计算出图标的实际经纬度信息,这也是比赛的最终要求。 参考文献:
[1] Wirth, N. (1998): A Computer System for Model Helicopter Flight Control, Technical Memo Nr1: The Hardware Core. Technical Report # 284, Department of Computer Science.
[2] T.J. Koo, F. Ho_mann, H. Shim, B. Sinopoli, and S.Sastry. Hybrid Control of Model Helicopter In Proc. of IFAC Workshop on Motion Control, pages 285-290,Grenoble, France October 1998.
[3] R. Gonzalez and R. Woods. Digital Image Processing. Addison-Wesley, 1992.
[4] Avionics system for aggressive maneuvers V.Gavrilets,A.Shterenberg, K.Sprague, M.A.Dahleh&E.Feron M.I.T.
[5] Georgia Tech UAV Software Systems S.Kannan,J.Hur,G.Saroufiem, I.Yavrucuk Georgia Institute of Technology, Atlanta.
|